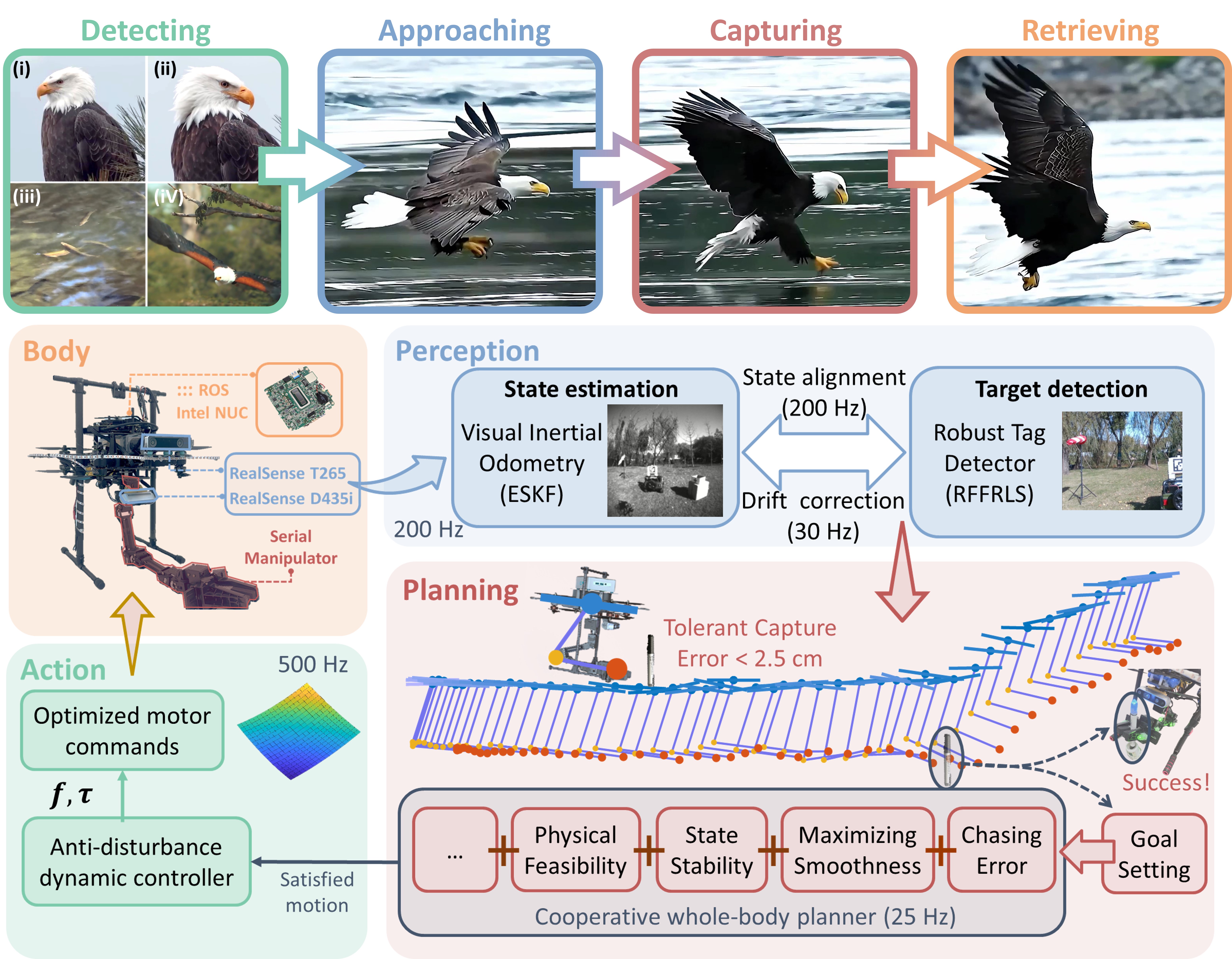
Dynamically aerial capturing with centimeter-level accuracy
Under Review (JCR Q1 IF:19.7), 2025
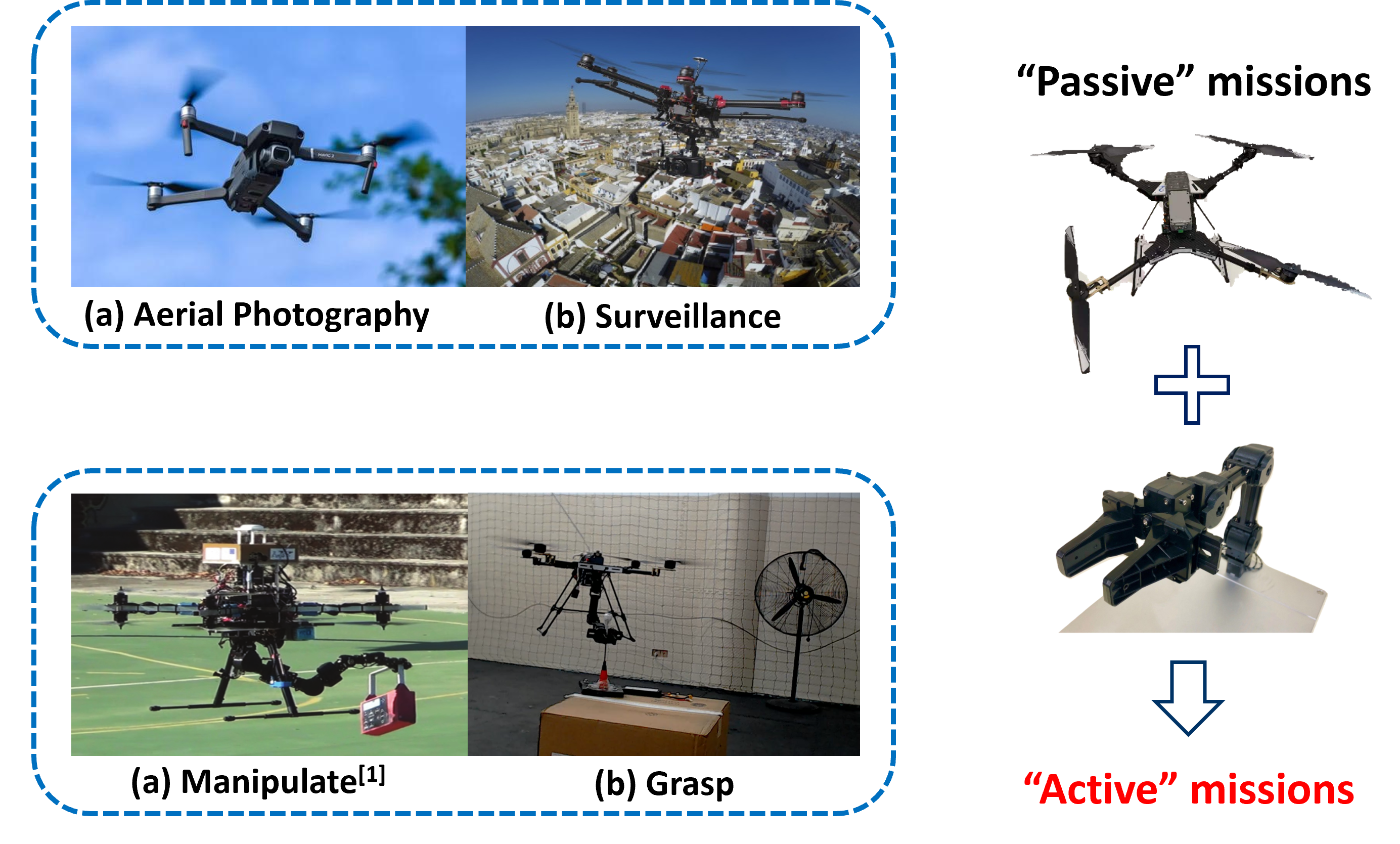
Current aerial manipulation platforms often sacrifice interaction precision for flight agility, depend on external localization, or are limited to quasi-static conditions. In this work, we develop a groundbreaking system named CAPTURER (Capturing Active Pen-sized Target via Unified and Robust Eagle-like Robot). Inspired by raptor morphology, CAPTURER achieves-for the first time dynamic capture of actively moving pen-sized targets, combining high agility with exceptional precision.